
Hi there
About me
I am a Postdoctoral fellow in the Laboratory of Intelligent Systems (LIS) under supervision of Dario Floreano, at École Polytechnique Fédérale de Lausanne (EPFL). My research interest lies on the intersection of robotics and AI, where I mainly focus on robot learning for emergent properties in swarms of robots.
Background
I finished my PhD in 2024 on the topic of robot learning in Evolutionary Robotics, at the Computational Intelligence group, Vrije Universiteit Amsterdam, in support of Technology Innovation Institute (TII), and supervised by Guszti Eiben and Eliseo Ferrante. My main focus was on the design of robot learning algorithms in the context of an evolving robot population. An evolving population of robots –where both body and brain are optimized– provides a challenging context regarding embodied intelligence, fast model agnostic learning, and adaptive control. Prior to my PhD, I obtained two master degrees: Human Movement Science, neuromechanics (with predicate cum laude Vrije Universiteit Amserdam) and Mechanical Engineering, bio-robotics (Technische Universiteit Delft).
I like to align different techniques, by combining ideas from my broad educational background, which provides a creative perspective to analyse challenging problems. My research lies in the intersection of robot learning, embodied intelligence, complex systems, and control theory. Currently, I am investigating the design of continuous adaptive neural networks for distributed learning in swarms. Here the focus lies on the robust emergence of collective behaviour, using only local information.
Selected Projects
Emergence of Specialised Collective Behaviors in Evolving Heterogeneous Swarms

Swarms of animal exhibit astonishing collective behaviours through coordinated collaboration, thereby elevating their capabilities as a whole, i.e. emergent capabilities. In this paper, we leverage collective behaviors by evolving swarms with different behavioral repertoires.
A model-free method to learn multiple skills in parallel on modular robots
In nature, many newborn animals can walk within minutes of birth. This Nature Communications publication, draws inspiration from this phenomenon with a novel method that enables robots to learn locomotion in just 15 minutes. Website
The Dutch ICU Data Warehouse
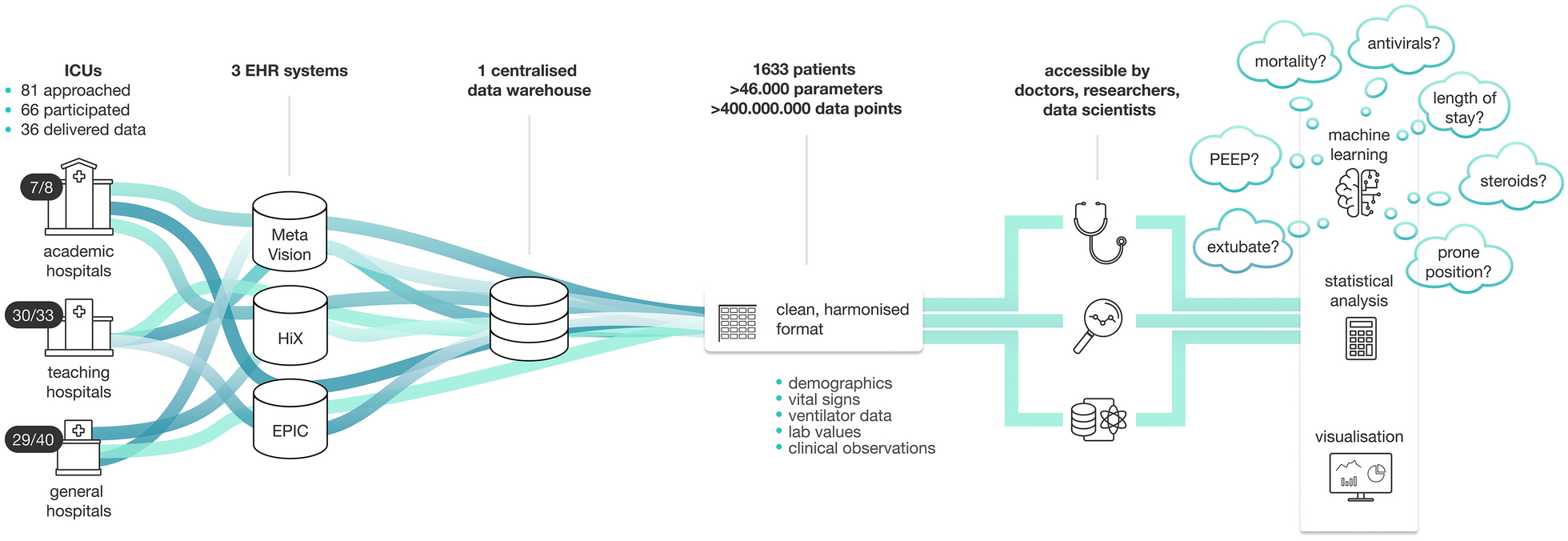
During COVID-19, a Dutch national collaboration was established between universities, hospital ICUs, and industry. The ICU data pipeline, provided analysis tools, and several machine learning models to analyse and improve health care policies.
Revolve

During my PhD, I mainly work in Python and C++ as part of a team that develops a software package called Revolve which is a wrapper for robot evolution experiments around different simulators (MuJoCo, Gazebo, Isaac Gym). Within this framework, I develop controllers for robots that learn motor skills from scratch.
Contact
Interested in my work? Please contact me at fuda.vandiggelen (at) epfl.ch